









Japan (JA)
国・地域を選択してください。
ORCA®-Questを用いたオーロラの観測
2024年10月11日公開
電気通信大学大学院 情報理工学研究科 情報・ネットワーク工学専攻 情報通信工学プログラム 細川研究室 様は、高感度カメラを用いたオーロラのイメージングを行っています。オーロラの観測には、形態や動態を観測するためのフレームレート、暗いオーロラを検出するための感度、取得した画像の解析をスムーズに行うための低ノイズ性、広視野での撮影を行うためのセンササイズなどが求められており、これらの課題を解決するカメラとしてORCA-Quest qCMOS®カメラを導入いただいております。
同研究室の細川 敬祐 様にORCA-Questを導入した経緯やその使用感、今後の研究の展望についてインタビューを行いました。
研究について
-研究内容について教えてください。
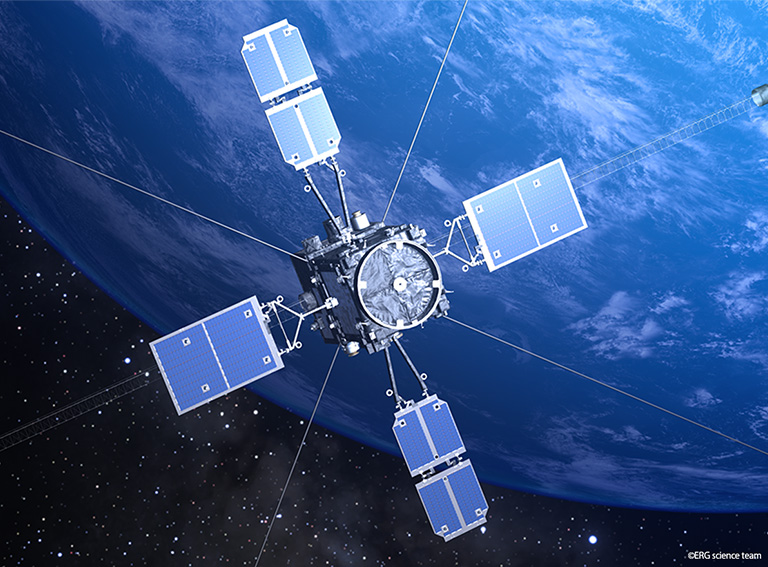
当研究室では、数秒から数十秒の周期で明滅する脈動オーロラを観測するために、北欧やアラスカの複数地点において高感度カメラを用いたオーロライメージングを行っています。2015年に開始した脈動オーロラ研究プロジェクト(Pulsating Aurora Project)では、浜松ホトニクス製のEM-CCDカメラ(ImagEMⓇ)を使い高い時間分解能のイメージングを行っています。このカメラを用いた地上からのオーロライメージングと、欧州非干渉散乱(EISCAT)レーダー、2016年12月に打ち上げられたジオスペース探査衛星「あらせ」や、2022年に打ち上げが行われた脈動オーロラロケット実験による観測を組み合わせて、脈動オーロラ明滅の起源を明らかにする研究を行っています。

Skibotn 観測所(ノルウェー王国)
細川 敬祐 様
オーロライメージングにおける課題
-オーロラのイメージングにはどのような課題があるのでしょうか。
オーロラのイメージングにおいては主に以下のような課題があります。
- 暗いオーロラを検出するための感度
- オーロラの形態を詳細に観測するための空間分解能
- カメラのノイズによるデータ解析への影響
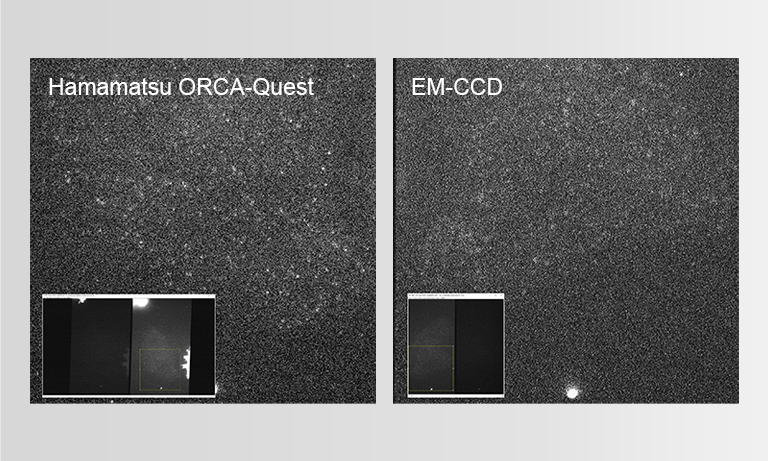
感度に関しては、以前まではEM-CCDカメラ(ImagEM)を使用していました。EM-CCDカメラは入射した電子を増倍することで非常に高感度な撮像ができるため、高い時間分解能を必要とするオーロラの観測において最適でした。ただし、EM-CCDカメラはピクセルサイズが大きいことに加え画素数も少ないため、広い範囲を撮影しようとすると空間分解能が低くなってしまい、オーロラの形態を詳細に観測することはできていませんでした。
先に述べたように、EM-CCDカメラは空間分解能の面が課題であったため、感度を維持しながらより高い空間分解能でイメージングをしたいと思っていると、浜松ホトニクスからORCA-Questという高感度且つ高解像度なカメラが登場したため、「空間分解能の面を改善できるかも」と思ったことを覚えています。
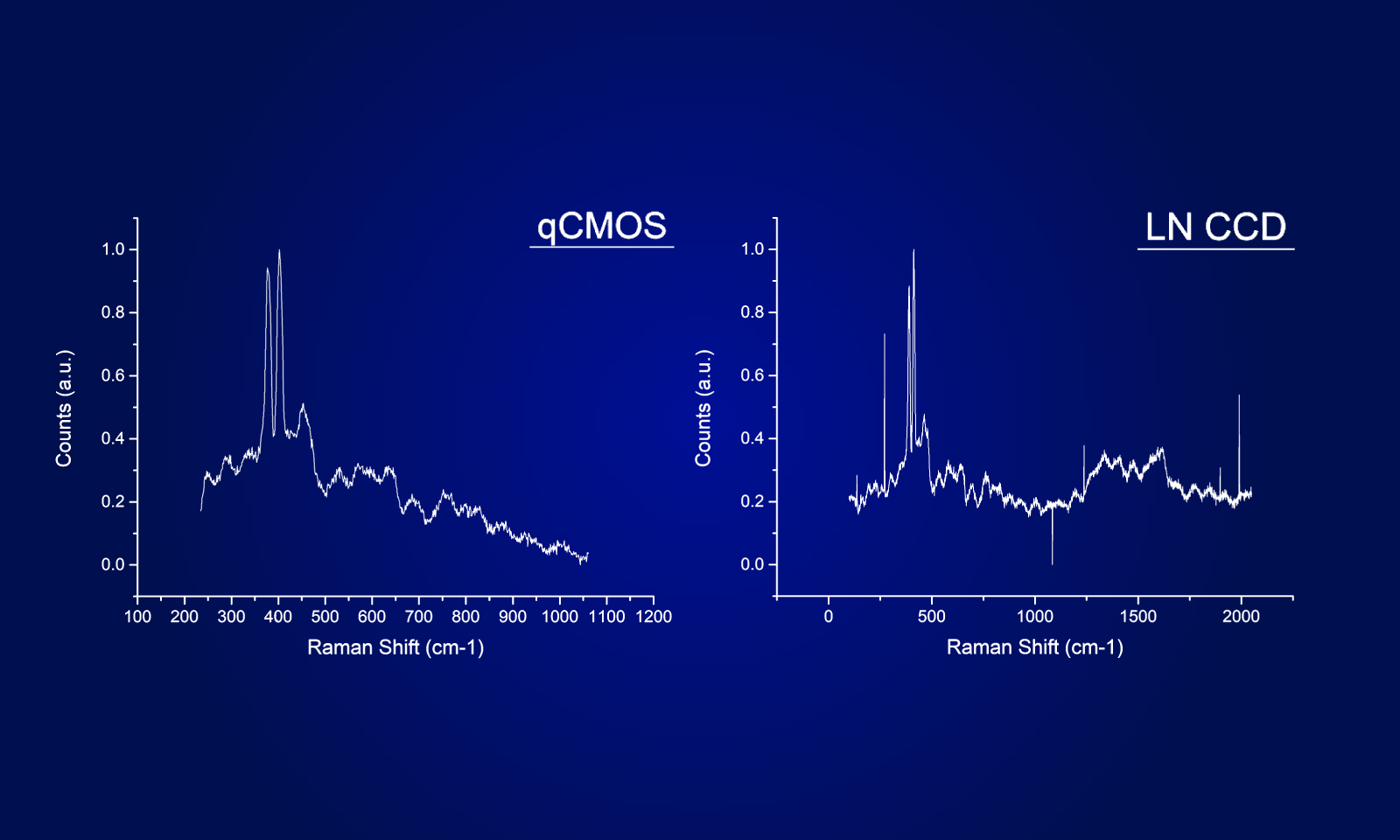
また、カメラのノイズによるデータ解析への影響に関しては、撮像した画像にオーロラからの信号以外が混じると、その後のデータ解析時に影響を受けてしまうため、できるだけノイズの少ないカメラを使う必要があります。EM-CCDカメラでは、信号を増倍することで読み出しノイズが相対的に小さくなる一方、信号を増倍した際に増倍ゆらぎと呼ばれる大きなノイズが加わってしまい、取得した画像のバックグラウンドがゆらぐため、解析がしにくいという課題がありました。

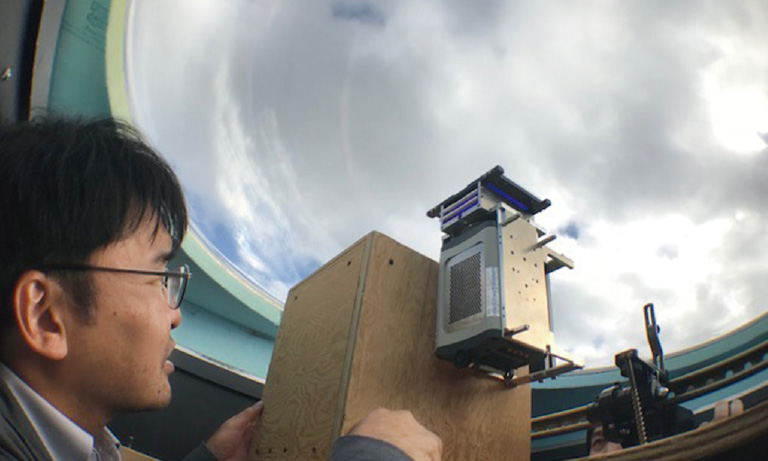
Skibotn観測所(ノルウェー王国)のドーム内に設置されたORCA-Quest
ORCA-Quest 導入の決め手
-ORCA-Questの導入に至った理由や決め手を教えてください。
ORCA-Questを導入した一番の決め手は、解像度が非常に高いことです。EM-CCDカメラの画素数は512 × 512であるのに対し、ORCA-Questは4096 × 2304と画素数が非常に多いことに加え、1画素のサイズもEM-CCDカメラが16 μm × 16 μmであるのに対し、ORCA-Questは4.6 μm × 4.6 μmと小さくなっているため、EM-CCDカメラよりもはるかに高い空間分解能でオーロラを観測できるようになりました。撮像範囲が変わったこともありますが、EM-CCDカメラとORCA-Questで取得した画像を比較すると約10倍程度空間分解能を向上させることができています。
また、感度の面においては画素サイズが大きく、電子増倍機能があるEM-CCDカメラには少し劣るものの、読み出しノイズが非常に小さくなったことで、かなり暗い現象でも検出ができるようになりました。EM-CCDカメラは電子増倍をして信号を稼げる半面、増倍によるゆらぎがノイズとなり解析に影響を及ぼしていましたが、ORCA-Questは電子増倍を行っていないため増倍ゆらぎの影響がなく、読み出しノイズや暗電流ノイズも非常に低く抑えられているため、ノイズの影響を受けずにデータ解析ができるという点も魅力でした。
観測例
カーテン状のオーロラの観測
スキャンモード:Ultra quiet scan
フレームレート:20フレーム/秒(2048 × 1152)
ビニング:2 × 2
データ提供:電気通信大学大学院 情報理工学研究科 情報・ネットワーク工学専攻 情報通信工学プログラム 細川研究室 細川 敬祐 様
波を打つオーロラの観測
スキャンモード:Ultra quiet scan
フレームレート:20フレーム/秒(1024 × 576)
ビニング:4 × 4
データ提供:電気通信大学大学院 情報理工学研究科 情報・ネットワーク工学専攻 情報通信工学プログラム 細川研究室 細川 敬祐 様
観測データの管理
-オーロラ観測のために常にカメラを稼働させているのでしょうか。また、ORCA-Questで取得した撮影データはどのように管理されているのでしょうか。
オーロラはいつ出現するのかが予想できないため、基本的にカメラは毎夜撮影をしています。そのため、画像データを保存しておく大容量のストレージが必要になりますが、ストレージ容量にも限界がありますし、観測したデータを観測地から日本にインターネット経由で送る必要もあるため、できるだけオーロラが撮影されていない不要なデータは削減したいという希望があります。
そこで現在考えているのは、AIを使った自動判別です。夜間撮影した画像を昼間のうちにAIを使って自動判別し、オーロラが撮影できている部分のみを残し、不要なデータを削除するプログラムを開発中です。すでに自動判定を行うためのAI(Tromsø AI)の開発は進んでいて、近いうちに実際の観測現場で試してみたいと考えています。これによって不要なデータを保存しなくて済むので、ストレージ容量の節約につながります。
また、AIを用いた観測のさらなる発展として、オーロラの出現だけでなく、オーロラの種類や明るさなどの詳細な情報をリアルタイムに自動で判定して、カメラのパラメータを最適化し撮影を行うといったこともやりたいと思っています。例えば動きの速いオーロラが出ているときはカメラの露光時間を短くして高い時間分解能での撮影を行い、非常に暗いオーロラが出ているときはカメラの露光時間を長くしたりビニングを使ったりして感度を稼ぎながら撮影するといったことができればいいなと思っています。
今後の研究展望
-今後の研究の展望を教えてください。
今後の研究展望としては主に以下のようなことを考えています。
- 100 km以下の空間スケールを持つメソスケールオーロラが果たしている役割の解明
- EISCAT_3D、人工衛星「あらせ」、ORCA-Quest等の地上観測データを用いた多次元的なデータ解析
- 複数のORCA-Questを用いた、多点光学観測網の構築
1に関しては、従来のカメラでは空間分解能が足りなかったことにより、微細な構造を持つメソスケールオーロラのメカニズムの解明ができていませんでした。今回ORCA-Questを導入したことにより空間分解能が向上したことに加え、国際共同で整備中のEISCAT_3Dレーダーを組み合わせて観測することで、メソスケールオーロラのメカニズム解明を加速させたいと考えています。
また、2に関しては、前述のORCA-QuestとEISCAT_3Dに加え、人工衛星「あらせ」のデータも組み合わせることで地上側、宇宙側の両面からオーロラのデータを取得し、多次元的にオーロラのメカニズムを解明することができると考えています。
ただし、2を行うためには、以下のような条件がすべてそろう必要があります。
- カメラ、レーダーの観測範囲上を「あらせ」が通過すること
- 「あらせ」が通過するタイミングでオーロラが出ていること
- オーロラが出ているタイミングで天気が良いこと(雲で覆われていないこと)
オーロラの出現タイミングと天気は変えられないため、「あらせ」が通過する軌道の下をできるだけ広い範囲でカバーできるように、3の複数台のORCA-Questを用いた多点光学観測網の構築を進めています。3つのカメラを別々の地点に配置し、観測したデータをパッチワークのように結合することで、広い範囲を観測することができます。すでにカメラは購入しているので、現在はカメラの設置を行うこととEISCAT_3Dの運用開始を待っているという状況です。

EISCAT_3Dレーダー
研究者プロフィール
細川 敬祐
電気通信大学大学院 情報理工学研究科 情報・ネットワーク工学専攻 情報通信工学プログラム 細川研究室 教授
2003年3月 京都大学大学院 理学研究科 博士課程(地球惑星科学専攻)修了(理学博士)
2003年4月 電気通信大学 電気通信学部 情報通信工学科 助手
2007年4月 電気通信大学 電気通信学部 情報通信工学科 助教
2012年6月 電気通信大学大学院 情報理工学研究科 情報・通信工学専攻 准教授
2019年4月 電気通信大学大学院 情報理工学研究科 情報・ネットワーク工学専攻 教授
2024年4月 電気通信大学 宇宙・電磁環境研究センター長
※ 本ページに掲載している内容は、2024年9月の取材時点のものです。
関連製品

ORCA-Quest 2は、ORCA-Questの後継機として極めて低ノイズなスキャンモードにおける読み出し速度の高速化や紫外領域での感度向上を実現。更なる進化を遂げた新たなqCMOSカメラです。
その他のお客様導入事例
- Confirmation
-
It looks like you're in the . If this is not your location, please select the correct region or country below.
You're headed to Hamamatsu Photonics website for JP (Japanese). If you want to view an other country's site, the optimized information will be provided by selecting options below.
In order to use this website comfortably, we use cookies. For cookie details please see our cookie policy.
- Cookie Policy
-
This website or its third-party tools use cookies, which are necessary to its functioning and required to achieve the purposes illustrated in this cookie policy. By closing the cookie warning banner, scrolling the page, clicking a link or continuing to browse otherwise, you agree to the use of cookies.
Hamamatsu uses cookies in order to enhance your experience on our website and ensure that our website functions.
You can visit this page at any time to learn more about cookies, get the most up to date information on how we use cookies and manage your cookie settings. We will not use cookies for any purpose other than the ones stated, but please note that we reserve the right to update our cookies.
1. What are cookies?
For modern websites to work according to visitor’s expectations, they need to collect certain basic information about visitors. To do this, a site will create small text files which are placed on visitor’s devices (computer or mobile) - these files are known as cookies when you access a website. Cookies are used in order to make websites function and work efficiently. Cookies are uniquely assigned to each visitor and can only be read by a web server in the domain that issued the cookie to the visitor. Cookies cannot be used to run programs or deliver viruses to a visitor’s device.
Cookies do various jobs which make the visitor’s experience of the internet much smoother and more interactive. For instance, cookies are used to remember the visitor’s preferences on sites they visit often, to remember language preference and to help navigate between pages more efficiently. Much, though not all, of the data collected is anonymous, though some of it is designed to detect browsing patterns and approximate geographical location to improve the visitor experience.
Certain type of cookies may require the data subject’s consent before storing them on the computer.
2. What are the different types of cookies?
This website uses two types of cookies:
- First party cookies. For our website, the first party cookies are controlled and maintained by Hamamatsu. No other parties have access to these cookies.
- Third party cookies. These cookies are implemented by organizations outside Hamamatsu. We do not have access to the data in these cookies, but we use these cookies to improve the overall website experience.
3. How do we use cookies?
This website uses cookies for following purposes:
- Certain cookies are necessary for our website to function. These are strictly necessary cookies and are required to enable website access, support navigation or provide relevant content. These cookies direct you to the correct region or country, and support security and ecommerce. Strictly necessary cookies also enforce your privacy preferences. Without these strictly necessary cookies, much of our website will not function.
- Analytics cookies are used to track website usage. This data enables us to improve our website usability, performance and website administration. In our analytics cookies, we do not store any personal identifying information.
- Functionality cookies. These are used to recognize you when you return to our website. This enables us to personalize our content for you, greet you by name and remember your preferences (for example, your choice of language or region).
- These cookies record your visit to our website, the pages you have visited and the links you have followed. We will use this information to make our website and the advertising displayed on it more relevant to your interests. We may also share this information with third parties for this purpose.
Cookies help us help you. Through the use of cookies, we learn what is important to our visitors and we develop and enhance website content and functionality to support your experience. Much of our website can be accessed if cookies are disabled, however certain website functions may not work. And, we believe your current and future visits will be enhanced if cookies are enabled.
4. Which cookies do we use?
There are two ways to manage cookie preferences.
- You can set your cookie preferences on your device or in your browser.
- You can set your cookie preferences at the website level.
If you don’t want to receive cookies, you can modify your browser so that it notifies you when cookies are sent to it or you can refuse cookies altogether. You can also delete cookies that have already been set.
If you wish to restrict or block web browser cookies which are set on your device then you can do this through your browser settings; the Help function within your browser should tell you how. Alternatively, you may wish to visit www.aboutcookies.org, which contains comprehensive information on how to do this on a wide variety of desktop browsers.
5. What are Internet tags and how do we use them with cookies?
Occasionally, we may use internet tags (also known as action tags, single-pixel GIFs, clear GIFs, invisible GIFs and 1-by-1 GIFs) at this site and may deploy these tags/cookies through a third-party advertising partner or a web analytical service partner which may be located and store the respective information (including your IP-address) in a foreign country. These tags/cookies are placed on both online advertisements that bring users to this site and on different pages of this site. We use this technology to measure the visitors' responses to our sites and the effectiveness of our advertising campaigns (including how many times a page is opened and which information is consulted) as well as to evaluate your use of this website. The third-party partner or the web analytical service partner may be able to collect data about visitors to our and other sites because of these internet tags/cookies, may compose reports regarding the website’s activity for us and may provide further services which are related to the use of the website and the internet. They may provide such information to other parties if there is a legal requirement that they do so, or if they hire the other parties to process information on their behalf.
If you would like more information about web tags and cookies associated with on-line advertising or to opt-out of third-party collection of this information, please visit the Network Advertising Initiative website http://www.networkadvertising.org.
6. Analytics and Advertisement Cookies
We use third-party cookies (such as Google Analytics) to track visitors on our website, to get reports about how visitors use the website and to inform, optimize and serve ads based on someone's past visits to our website.
You may opt-out of Google Analytics cookies by the websites provided by Google:
https://tools.google.com/dlpage/gaoptout?hl=en
As provided in this Privacy Policy (Article 5), you can learn more about opt-out cookies by the website provided by Network Advertising Initiative:
http://www.networkadvertising.org
We inform you that in such case you will not be able to wholly use all functions of our website.
Close